Zware machines met roterende delen genereren dynamische krachten, waardoor een voldoende stijf fundament nodig is. Minimale amplitudes en trillingssnelheden kunnen namelijk al leiden tot kostbare schade en storingen aan de machine. Het analyseren en beoordelen van het dynamische gedrag van het fundament behoort daarom tot een van de belangrijkste aspecten van de constructieve berekening.
Een van de grootste industriële complexen van Noordwest-Europa vervangt één van zijn Gasturbine en Alternator (wisselstroomgenerator) Units (GTA-Units) om in de toekomst meer en op efficiëntere wijze elektrische stroom te kunnen opwekken. De nieuwe machine weegt meer dan 300 ton en genereert een elektrisch vermogen van 60 MW. Dit is 20% meer dan de oude capaciteit. De fabrieken zijn hierdoor minder afhankelijk van de relatief dure netstroom. In verband met de risico’s en kosten moet de huidige machine tijdens de vervanging in bedrijf blijven. Hierdoor is er voor de nieuwe GTA-Unit een nieuw fundament nodig.
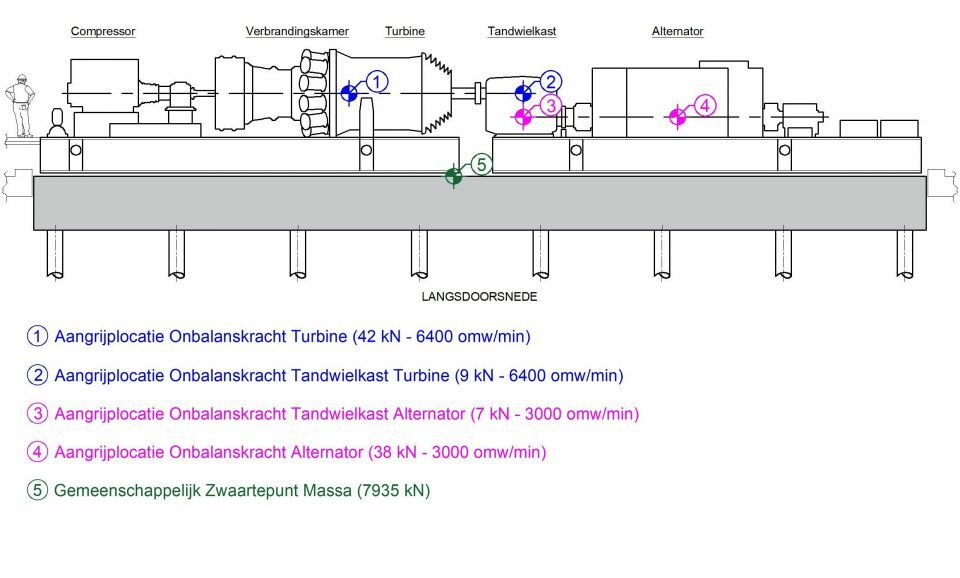
De roterende delen van de GTA-Unit veroorzaken dynamische krachten (onbalanskrachten), waardoor hinderlijke en schadelijke trillingen en/of resonanties kunnen ontstaan. Om dit te voorkomen, is de eigenfrequentie van het fundament bepaald en zijn de optredende amplitudes en trillingssnelheden berekend. De belangrijkste aspecten die van invloed zijn op een dynamische analyse zijn:
Een GTA-Unit bestaat hoofdzakelijk uit een compressor, verbrandingskamer, turbine, tandwielkast en alternator (fig. 2). Met de compressor wordt de lucht aangezogen en samengeperst, waardoor de luchttemperatuur en -druk toenemen. In de verbrandingskamer wordt vloeibaar gas ingespoten waarna het mengsel van de gecomprimeerde lucht en vloeistof wordt ontstoken (chemische energie). De geëxpandeerde uitlaatgassen, die zich met hoge snelheid in de straalbuis van de turbine voortbewegen, zorgen ervoor dat de rotorbladen gaan draaien (kinetische energie) en de turbine-as wordt aangedreven. Ter plaatse van de tussenliggende tandwielkast, die beide machine-assen koppelt, wordt de rotorsnelheid van de turbine (6400 omw/min resp. 106 Hz) omgezet naar het toerental van de alternator (3000 omw/min resp. 50 Hz). De alternator bestaat uit elektromagneten (rotor) die rondom zijn voorzien van koperen spoelen (stator). Door de magnetische velden gaat de rotor draaien, waardoor elektrische spanning wordt opgewekt en er stroom gaat vloeien (elektrische energie). Door de GTA-Unit te combineren met een Heat Recovery Steam Generator (HRSG) kan een aanzienlijk hoger rendement worden verkregen. De warme rookgassen, die vrijkomen uit het verbrandingsproces, kunnen onder andere door de HRSG worden opgevangen en gebruikt om bijvoorbeeld een stoomturbine aan te drijven. Hierdoor kan nog meer elektriciteit worden geproduceerd. De afgewerkte stroom kan vervolgens voor verwarmingsdoeleinden worden gebruikt.

{kind=link}
Reacties